目前除了歐盟之外,世界各國並未對機器手臂的雜訊訂出管制規範。但相關規定很快就會制定完成,因此手臂製造商在開發下一代手臂時,必須開始認真看待產品的EMI問題。
機器人大致可以分為工業機器人和服務機器人。目前除了歐洲地區,並沒有適用於機器人的官方雜訊管制。但雜訊標準組織CISPR委員會正在討論適用於機器人的雜訊規格,預計初版規範最晚將於2024年對外公布。根據網路上公布的資訊顯示,CISPR委員會正考慮將CISPR11作為適用於機器人的雜訊規格。
雜訊抑制(Noise Suppression)包含發射抑制和抗擾度抑制兩個面向。目前的機器人內大多只採取各種方法來防止因外部干擾而發生的故障,也就是抗擾度抑制。但隨著管制條例的出現,過去並未被視為問題點的發射抑制預估將成為關鍵。因此,在本文中,我們將針對機器人的發射抑制進行要點解說(圖1)。
圖1 除歐洲外,世界其他國家也將在未來幾年對機器人設備實施雜訊管制
本文將以案例介紹機器人的發射抑制對策。在目前的CISPR11規範中,要求對2種類型的雜訊採取對策,分別是150kHz~30MHz頻率範圍內的傳導雜訊,以及在30MHz~1GHz範圍內的輻射雜訊。但由於機器人雜訊管制規定尚未正式對外公佈,因此雜訊管制的實際內容仍可能發生變化。
市售機器人雜訊評估
在此次發射雜訊評估中,我們參考CISPR11輻射雜訊測量環境,測量了一組市售多關節機器人的輻射雜訊。該測試的配置及主要參數如圖2。
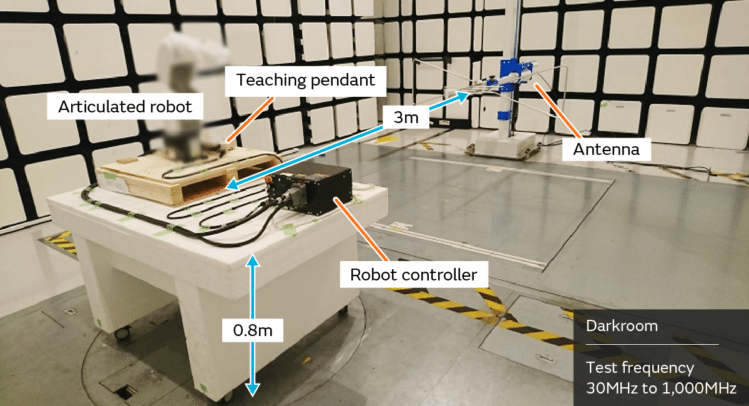
圖2 針對市售多關節機器人,在天線與待測物距離為3公尺的條件下量測其輻射雜訊
依照CISPR11,我們在進行輻射雜訊評估時,設定了Class A與Class B 2個雜訊容許值。Class A包括未直接連接到低壓電網(可理解為商用AC電網)的設備,好比透過配電櫃或其他高壓接收裝置向設備提供交流電;而Class B則是直接連接到低壓電網的設備,例如交流電透過電線杆上的變壓器或其他公共配電網供電的情況。
多關節機器人目前主要應用於工廠,但此次我們準備的市售實機輻射雜訊測試結果已經超出CISPR11 Class A的容許值,顯然並不符合將來的適用標準(圖3)。因為目前還沒有適用於機器人的雜訊管制規範,所以這種狀態不會出問題,但如果未來機器人的雜訊管制正式上路,就可能需要採取新的雜訊抑制對策。
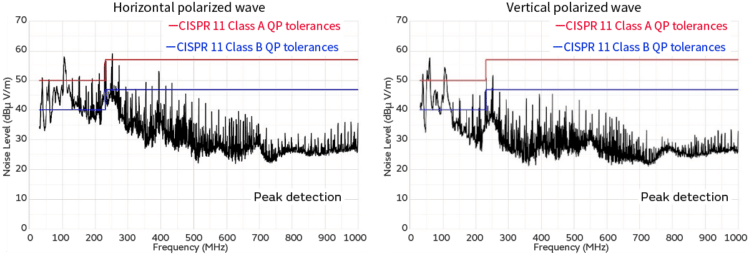
圖3 市售實機的輻射雜訊測試結果
輻射雜訊產生機制解析
為了對輻射雜訊進行更深入的調查,我們鎖定了雜訊源、雜訊傳導路徑作為目標。針對雜訊源,我們透過磁場探頭跟電場探頭進行電磁場分布調查,尋找相似於產生輻射雜訊方向的頻譜位置;在傳導路徑方面,我們則使用磁場探頭跟電場探頭量測訊號線跟電源線上的傳導雜訊,測量雜訊產生方向是否隨電纜有無連接而變化。
同時,我們試圖進行雜訊分離(輻射天線調查),藉由使用屏蔽盒、屏蔽布等器材單獨屏蔽設備,或是將鐵氧體磁芯連接到電纜上,並嘗試改變操作模式,來觀察雜訊的變化情況(圖4)。
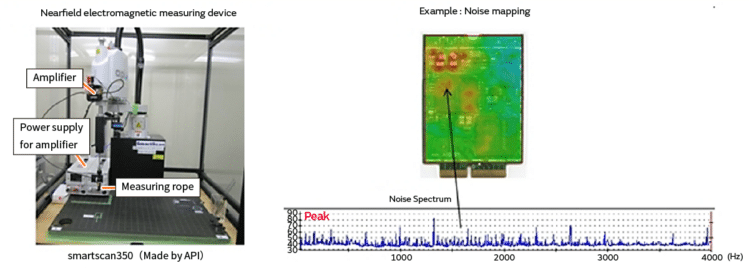
圖4 對輻射雜訊進行進一步研究的測試配置與量測結果
我們調查市售多關節機器人的輻射雜訊產生機制後,發現了如圖5所示的情況。
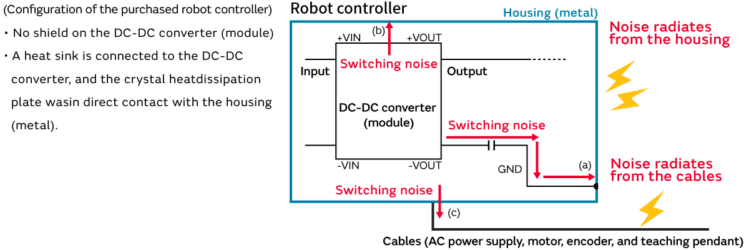
圖5 導致外部輻射的天線是控制器外殼和各個電纜
雜訊源是來自DC-DC轉換器模組的開關雜訊,該轉換器的開關頻率470kHz。雜訊傳導路徑共有三個,第一個是開關雜訊傳導到DC-DC轉換器輸出的負極線(圖5中的a路徑)。因為負極線連接到控制器的外殼,所以開關雜訊傳導到了外殼上。第二個是由於DC-DC轉換器的晶體散熱板(開關雜訊耦合的散熱板)與外殼接觸,導致雜訊傳導到了外殼上(圖5中的b路徑);第三個是雜訊傳導到連接帶有開關雜訊的控制電路板上的各個電纜,包含AC電源、馬達、編碼器與示教器電纜(圖5中的c路徑)。
為了抑制輻射雜訊,需要防止雜訊傳導至控制器外殼與各個電纜。如圖6所示,我們認為隔絕DC-DC轉換器模組以及在雜訊傳導路徑中插入濾波器是最有效的方式。
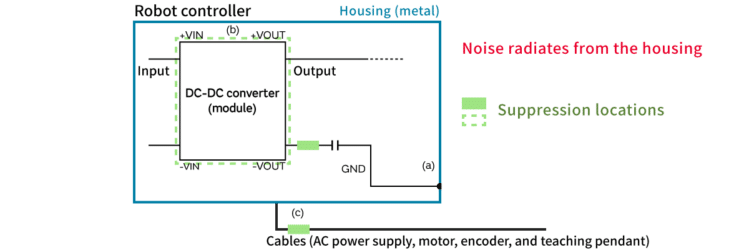 圖6 輻射雜訊對策方案。針對a路徑,在輸出負極線上安裝鐵氧體磁珠等雜訊濾波器;針對b路徑,則是將DC-DC轉換器屏蔽,不讓雜訊與晶體散熱板耦合;針對c路徑,則是在每條電纜上安裝共模扼流圈、鐵氧體磁珠等雜訊濾波器。
圖6 輻射雜訊對策方案。針對a路徑,在輸出負極線上安裝鐵氧體磁珠等雜訊濾波器;針對b路徑,則是將DC-DC轉換器屏蔽,不讓雜訊與晶體散熱板耦合;針對c路徑,則是在每條電纜上安裝共模扼流圈、鐵氧體磁珠等雜訊濾波器。
然而,在結構上很難屏蔽DC-DC轉換器,因為使用遮罩無法徹底消除與散熱板一同產生的雜訊,還會妨礙散熱,導致DC-DC轉換器因過熱而發生故障,即使對a路徑和c路徑採取了對策,雜訊也會通過b路徑傳導,所以我們也無法確認抑制雜訊效果。
為了對b路徑採取對策,我們認為有必要重新審視布線圖、DC-DC轉換器模組的選擇以及重新考慮散熱方法,並且認知到透過改裝來抑制雜訊的作法,無法完全解決雜訊問題。