作用距離的劣勢限制結構光的應用,ToF技術則彌補了距離上的缺陷,此外,ToF的模組複雜度低,堆疊簡單,可以做到非常小巧且堅固耐用,在屏占比不斷提高的外觀趨勢下,更得到手機廠商的青睞。
目前存在兩種ToF技術路線:iToF(間接飛行時間,indirect-ToF)和dToF(直接飛行時間,direct-ToF)。iToF間接測量飛行時間,具備低成本、較高解析度優勢,適用於短距離測距。iToF原理為把發射的光調製成一定頻率的週期型信號,測量該發射信號與到達被測量物反射回接收端時的相位差,間接計算出飛行時間。由於iToF sensor 的pixel相對較小,可實現相對高圖像解析度。但iToF的問題在於測距精度的限制了最大測距距離,從原理上看,調製頻率越高則測距精度越好,高調製頻率意味著對應的測距距離不能太大,並且環境光會對電路產生干擾。因此目前iToF主要應用在手機面部識別、手勢識別等測距距離較短的場景中。
iToF感測器電路相對簡單,難點主要在深度演算法,安卓陣營自2018年引入iToF並推動其主流化。目前如三星、華為、OPPO、vivo等品牌均有在中高端機型中配臵,除此之外,iToF在物體識別,3D重建以及行為分析等應用場景中能夠重現場景中更多的細節資訊,因此還被廣泛應用于機器人、新零售等領域。
dToF直接測量飛行時間,具備低功耗、抗干擾等優勢,適用於對測距精度要求高的較遠距離測距場景。dToF原理為向被測物體發射光脈衝,通過對反射和發射光脈衝時間間隔的測量,直接計算待測物體的深度。測距原理使得dToF測量精度不會因距離增大而降低,功耗更低同時對環境光的抗干擾能力更強。
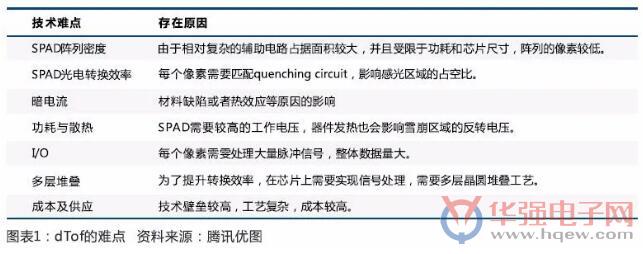
dToF深度演算法相對簡單,難點在於用以實現較高精度的SPAD。dToF要檢測光脈衝信號(納秒甚至皮秒級),因而對光的敏感度要求會很高,因此接收端通常選擇SPAD(單光子雪崩二極體)或者APD(雪崩光電二極體)這類感測器來實現,集成度弱于普通的CMOS圖像感測器,圖元尺寸一般大於10μm,從而解析度通常較差,成本更高。SPAD是dToF技術的核心,技術難度大且製作工藝複雜,目前世界上極少廠家具備量產能力,集成難度很高難以小型化應用在手機等小型消費電子上,因而除傳統熱門應用領域車載LiDAR之外,消費電子領域目前僅有蘋果一家實現商用(iPadPro首次搭載)。
未來ToF會向更高集成度、更小的感測器尺寸、更高解析度發展。
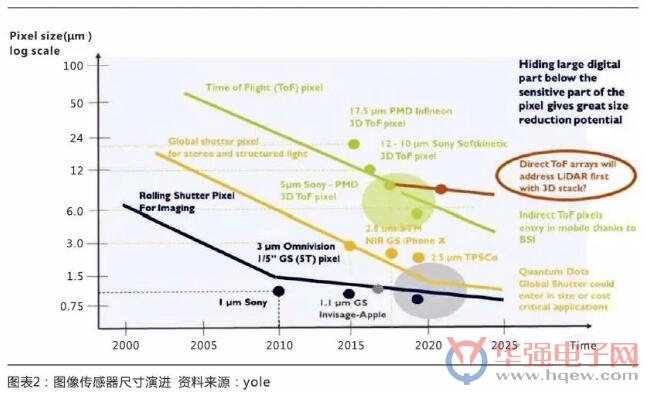
目前傳統的CIS單圖元尺寸最小可達到0.7μm,而目前0.6μm也已經在研發中。但ToF感測器更要求單圖元獲取信號的能力,因而需要更大的單圖元尺寸;dToF感測器電路設計比較複雜,需佔據較大的片上尺寸;iTOF圖元尺寸則需暫時讓步于更高的集光效率。種種原因使得ToF圖像感測器的小型化存在一定困難。
半導體工藝改進將有望實現ToF感測器小型化。ToF感測器廠商通過半導體工藝方案的改進,如背照式(BSI)、堆疊式(Stacked)CMOS等技術,將原本位於光電二極體上方的佈線層移至下方,以及將光電轉換器、電子倍增器(electron multipier)這些部分垂直堆疊,增大圖元開口率,同時減小圖元尺寸。目前根據松下最新的研究成果,dToF感測器也可以用CMOS工藝實現,集成度已經在數量級上逼近iToF方案。
目前ToF技術低解析度的固有缺陷仍然存在,未來有望隨技術更迭而實現突破。目前ToF測量精度量級仍然相較結構光方案落後,但近兩年其感測器解析度已經在提升。iToF方面,英飛淩面向消費市場的一般REAL3?感測器(iToF)也達到了3.8萬圖元,2019年推出的IRS2771C則達到15萬圖元;dToF方面,例如iPad Pro 2020的LiDAR解析度達到了3萬圖元;另外TDC電路設計進步也逐步提升CMOS電路中的TDC時間解析度精度,有望帶來dToF的解析度的提升。